Project Description
A telerobot, is a telepresence device that allows a user to interact with a robot over the internet. There are few active public telerobots on the internet. This work describes a new Internet telerobot framework suitable for autonomous mobile robots and designed for user edutainment.
Users could give the robot navigation goals. The results demonstrated a reliable autonomous mobile robot system that, within 24 hours of continuous operation, reached 447 goals, traveled 199 meters, and an Internet telerobot framework that can support many users and uploaded images totaling 19GB.
This project was the result of Scott Heath and Angus Cummings’ undergraduate projects.
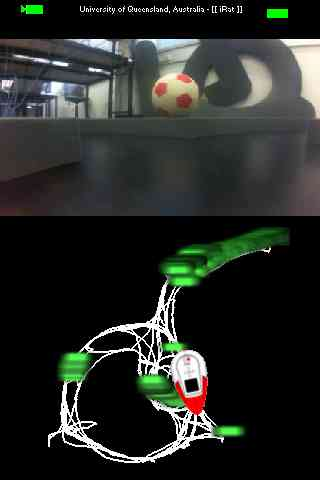
Screenshot of the GUI for mobile devices. At the very top is the status bar showing online/offline state, name, and battery voltage. Next is the robot’s view of the environment. At the bottom is the experience map showing locations the dock is visible from (green).
Publication
S Heath, A Cummings, J Wiles, and D Ball (2011) A Rat in the Browser, Australian Conference on Robotics and Automation (ACRA), Melbourne, Australia