Project Description
aka Maintaining a Cognitive Map in Darkness: The Need to Fuse Boundary Knowledge with Path Integration
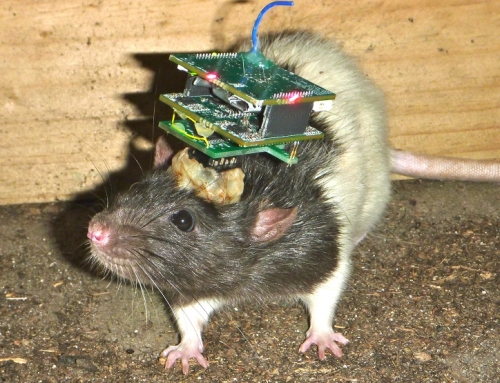
The iRat was used in one of Allen Cheung’s studies to find out if animals need “cognitive maps”. From the abstract: “Spatial navigation requires the processing of complex, disparate and often ambiguous sensory data. The neurocomputations underpinning this vital ability remain poorly understood. Controversy remains as to whether multimodal sensory information must be combined into a unified representation, consistent with Tolman’s “cognitive map”, or whether differential activation of independent navigation modules suffice to explain observed navigation behaviour. Here we demonstrate that key neural correlates of spatial navigation in darkness cannot be explained if the path integration system acted independently of boundary (landmark) information…”
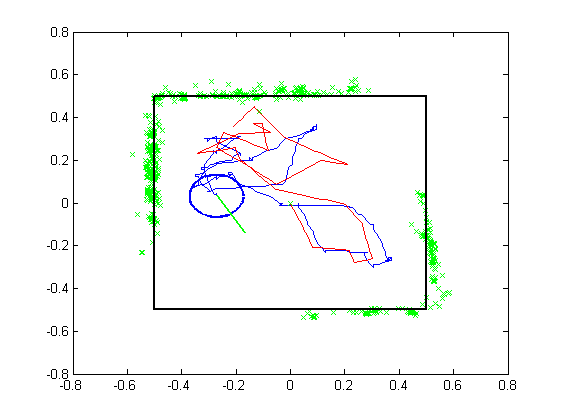
iRat global pose tracked overhead (blue line), integrated wheel odometry (red line) and sensory wall measurements (green crosses). The goal is to maintain accurate global pose by resetting the iRat’s internal map position when colliding with the wall.
Publications
Cheung A, Ball D, Milford M, Wyeth G, Wiles J (2012) Maintaining a Cognitive Map in Darkness: The Need to Fuse Boundary Knowledge with Path Integration. PLoS Comput Biol 8(8): e1002651. doi:10.1371/journal.pcbi.1002651