Project Description
Robots comprised of an omni directional drive system have a distinct kinematic and mobility advantage over the standard differential drive and Ackermann (car-like) drive. In this project we designed an omni directional drive robot with very high mobility that can negotiate typical edge and gap traversal obstacles in an indoor environment.
It is based on a novel spherical drive mechanism which has the advantage of continuous contact with the ground plane to reduce vibration and isotropic rotational characteristics that facilitate improved traversal properties. The mechanism is mechanically simple and efficient in its use of volume.
Our results demonstrated the robot’s ability to traverse edges and gaps where other popular Omns wheels grind to a halt. Chris Lehnert designed this Omni drive robot as part of his undergraduate thesis, which I supervised. Hopefully, someday we will create an even larger and faster version of this high mobility robot.
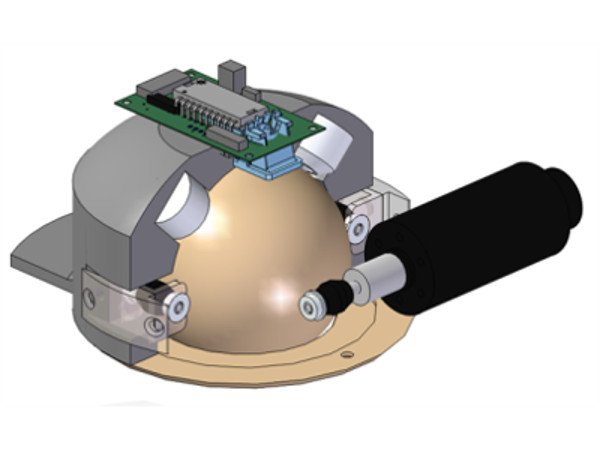
The mechanism has a single actuated roller located on the sphere on the great circle that is parallel to the ground plane (half way up the sphere in height). The actuated roller is parallel to the ground plane. The actuated roller rotates the sphere in the active direction due to the deformation of the rubber roller which creates a small contact surface allowing traction. The sphere rotates in the passive (slip) direction by rotating around the small contact surface with the actuated roller. This slip is possible because of the position of the actuated roller on the sphere. The roller is shaped to minimize the surface area in contact when the sphere rotates around the contact point.
Check out the video to see our prototype robot traversing obstacles.
Publications
D. Ball, C. Lehnert, G. Wyeth (2010) A Practical Implementation of a Continuous Isotropic Spherical Omnidirectional Drive, Proceedings of the International Conference on Robotics and Automation (ICRA), Anchorage, Alaska.
