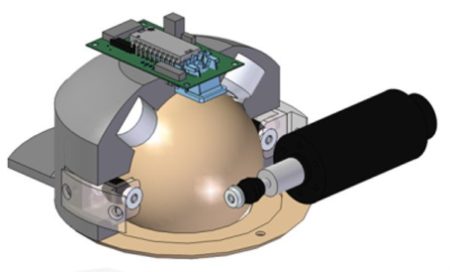
Robots comprised of an omni directional drive system have a distinct kinematic and mobility advantage over the standard differential drive and Ackermann (car-like) drive. In this project we designed an omni directional drive robot with very high mobility that can negotiate typical edge and gap traversal obstacles in an indoor environment. It is based on a novel spherical drive mechanism which has the advantage of continuous contact with the ground plane to reduce [...]