Project Description
In this study a spiking network controls the iRat in real time. The study demonstrates how the neural controller directs the rat animat’s movement towards temporal stimuli of the appropriate frequency using an approach based on Braitenberg Vehicles.
The circuit responds robustly after four cycles when first detecting a light pulsing at 1 Hz, and rapidly after one-to-three cycles when primed by recent experiences with the same frequency.
This study is the first to demonstrate a biologically-inspired spike-based robot that is both robust and rapid in detecting and responding to temporal dynamics in the environment. It provides the basis for further studies of biologically-inspired spike-based robotics.
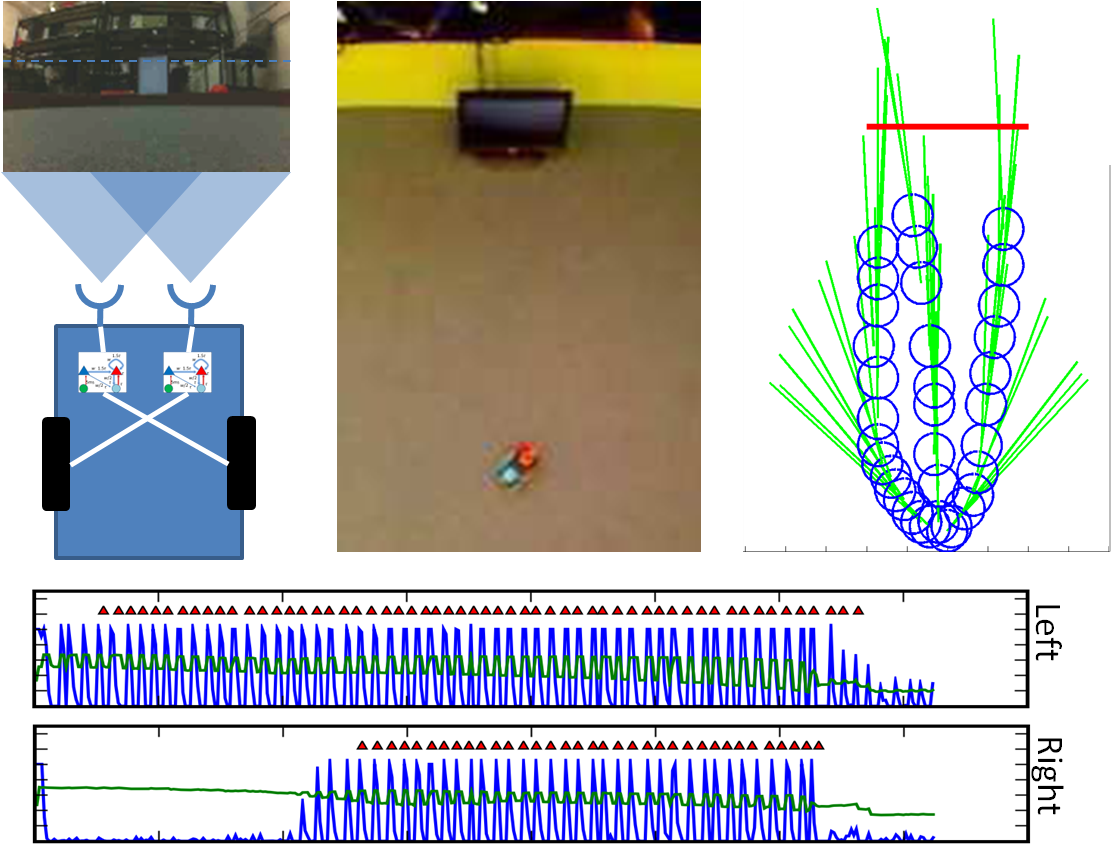
iRat location and spiking network output while tracking a 1Hz flashing stimulus. (top left) Rat animat showing two light sensors, their respective resonant circuits and crossed connections to the wheels. (top middle) Tracking camera view. (top right) Tracking data showing three trials, first with the robot directly facing the flashing stimulus, then rotated approximately 45° to the left and right. (bottom) Left and right sensor responses (see publication for details).
Publication
J. Wiles, D. Ball, S. Heath, C. Nolan and P. Stratton (2010) Spike-Time Robotics: A Rapid Response Circuit for a Robot that Seeks Temporally Varying Stimuli, 17th International Conference on Neural Information Processing (ICONIP)