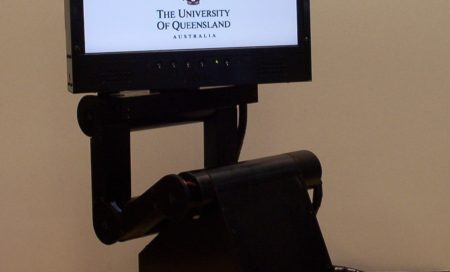
aka Robot Arm for Video Screen Manipulation The goal of the SAParm Project was to produce a proof-of-concept robotic video conferencing system to convey gestures of a remote conference participant. It could mimic human gestures such as nodding and shaking its head; show interest or strong feeling by moving forward; and indicate disinterest by moving backwards. It also moved in a very natural way by first turning its head, followed by [...]