Project Description
The iRat (intelligent Rat animat Technology) is a rat animat robot designed for robotic and neuroscience teams as a tool for studies in navigation, embodied cognition, and neuroscience research. The rat animat has capabilities comparable to the (then) popular standard Pioneer DX robots, but is an order of magnitude smaller in size and weight. The robot’s specifications are:
- approximately 0.08m2 with a mass of 0.5kg,
- camera sensor,
- proximity and odometry sensors,
- a differential drive,
- a 1 GHz x86 computer,
- and LCD navigation pad interface.
To augment the value of the platform to a broader range of researchers, the robot uses the Player-Stage or Robot Operating System (ROS) frameworks, and C/C++, Python, and MATLAB APIs have been tested in real time. We have made several iRats in a variety of colours.
I led the development of this robot by designing the first prototype to test the concept. I then collaborated with an industrial design group to produce the final robot. Scott Heath wrote much of the robot’s software.
This robot has and continues to be used in a wide variety of experiments such as:
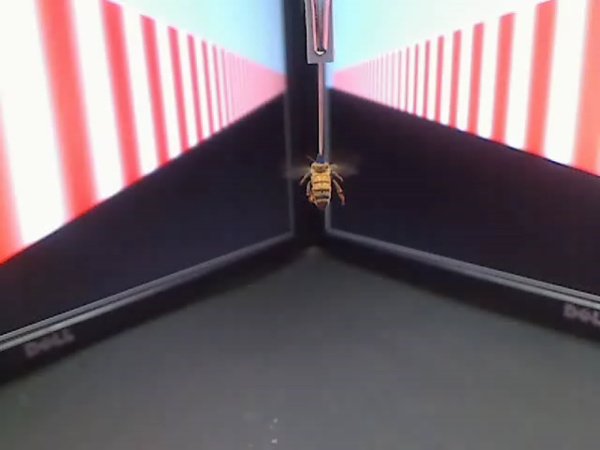
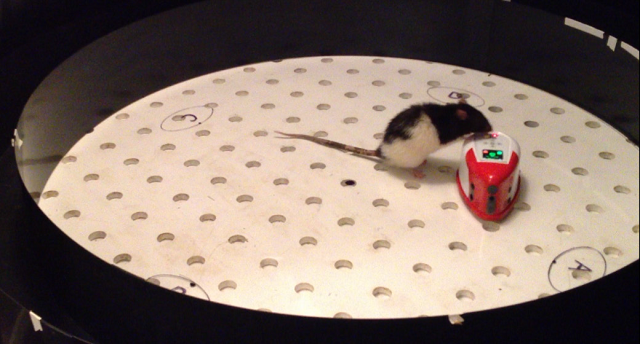
- interacting with real rats,
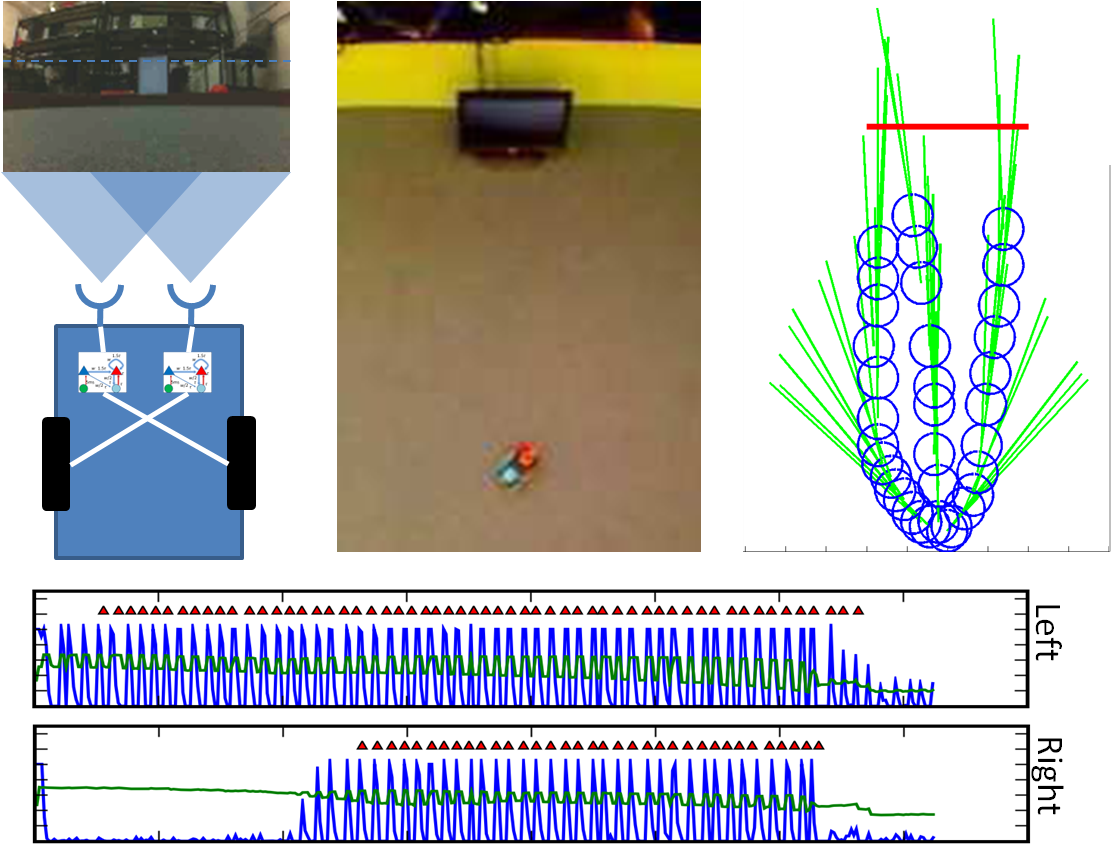
- navigation challenges,
- language robots,
- spiking neural networks,
- and for online telepresence.
You can find out more about these in the related projects.

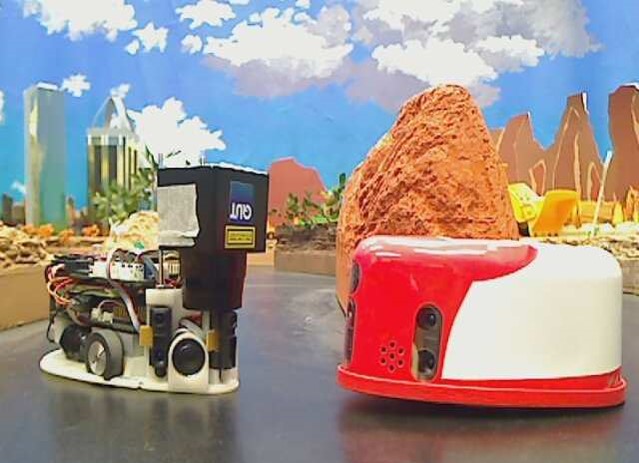
Final iRat next to computer mouse for scale. An industrial design company, Infinity Design, has styled the iRat’s cover to give a professional look suitable for commercialisation.
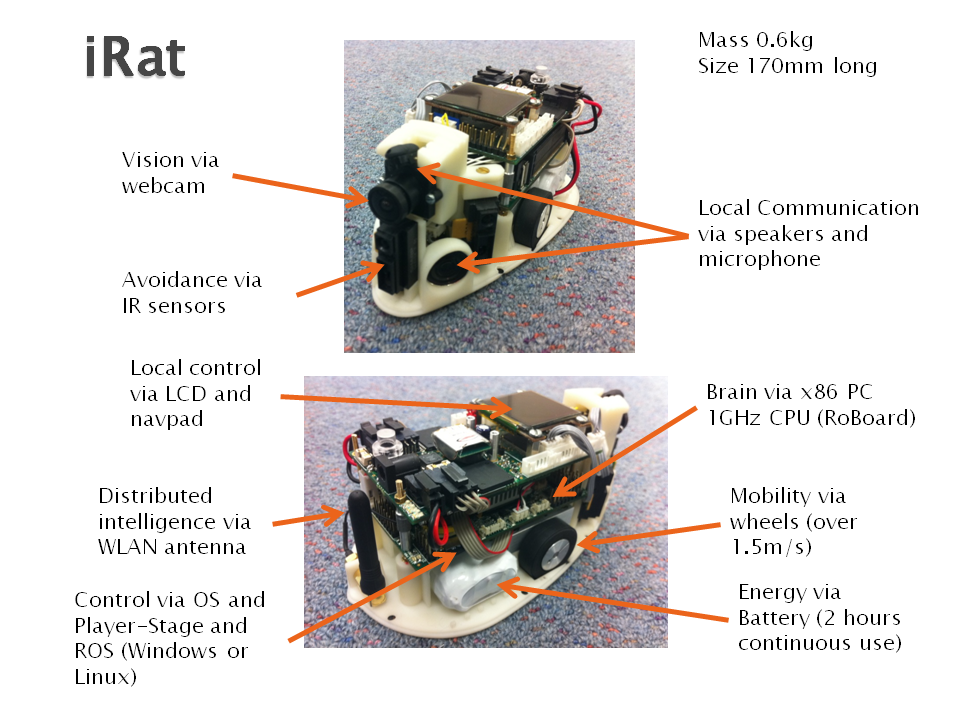
This shows the different parts of the iRat.
Publications
D. Ball, S. Heath, G. Wyeth and J. Wiles (2010) iRat: Intelligent Rat Animat Technology, Proceedings of the 2010 Australasian Conference on Robotics and Automation (ACRA), Brisbane, Australia
Invited Presentations
Presentation – A Rat Animat at the “James S. McDonnell Foundation Adult Neurogenesis Consortium Meeting”, San Diego, USA in May 2010
Workshop – A Rat Animat at the “Temporal Dynamics and Learning Centre”, San Diego, USA in May 2010
Presentation – Thinking Systems: Engineering “collaborations between engineers and neuroscientists” at the “James S. McDonnell Foundation Adult Neurogenesis Consortium Meeting”, San Diego, USA in May 2009