Project Description
The RoboRoos Robot Soccer team competed in the Small Size League of the annual RoboCup competitions. The goal of the RoboCup federation is “By the year 2050, develop a team of fully autonomous humanoid robots that can win against the human world soccer champion team.”
The rules are similar to the human version of the game (FIFA), other than the elimination of the offside rule as well as modifications that accommodate wheeled robots. The robots are fully autonomous; strategy or control input is not permitted by the human operators, but humans do referee the matches. This league is known for its highly dynamic and competitive nature.
I joined the team for my undergraduate thesis in 2001 where I helped redesign the electronics and software for our new omnidirectional robots. We travelled to the RoboCup competition in Seattle, USA.
In the following year the team travelled to Fukuoka, Japan. Following this experience, I helped supervise numerous undergraduate projects to further develop the RoboRoos team. I led the team in 2003 and 2004 where we came second at RoboCup in Padua, Italy and second again at RoboCup in Portugal, Spain. The success of the team was the result of the hard work and commitment of many people.
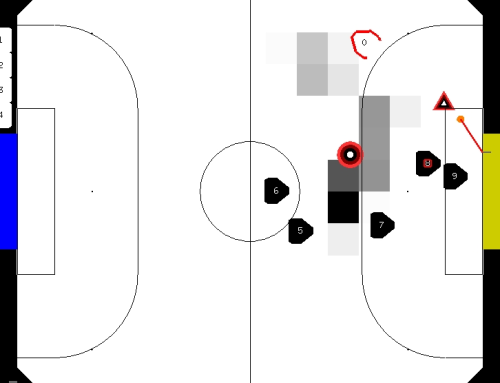
This video shows one of our games against CMDragons in Padua, Italy. You can explore how the system worked on my About the RoboRoos page.
Each team has five robots that each must physically fit inside a cylinder with a diameter of 180mm and a height of 150mm. Devices to dribble and kick the ball are permitted as long as they do not hold the ball and 80% of the ball is kept outside of the convex hull of the robot. The field is approximately 3 x 4 metres, with an orange golf ball acting as the soccer ball. Generally teams use global overhead vision as the primary sensor although some teams mount cameras on their robots. There are two 10 minute halves, with the clock stopping for any break in play (such as a foul or the ball going out of bounds).
Results
1998 – (Paris, France) Second Place
1999 – (Stockholm, Sweden) Knocked out in the quarter final.
2000 – (Melbourne, Australia) Knocked out in the semi final.
2001 – (Seattle, USA) Knocked out in the quarter finals
2002 – (Fukuoka, Japan) Knocked out in the round robin.
2003 – (Padua, Italy) Second Place
2004 – (Lisboa, Portugal) Second Place
Publications
D. Ball and G. Wyeth (2004) Multi-Robot Control in Highly Dynamic, Competitive Environments, RoboCup 2003: Robot Soccer World Cup VII. Lecture Notes in Artificial Intelligence 3020, Springer Verlag, Padua, Italy.
D. Ball, G. Wyeth and S. Nuske (2004) A Global Vision System for a Robot Soccer Team, Proceedings of the 2004 Australasian Conference on Robotics and Automation (ACRA), Canberra, Australia.
D. Ball, G. Wyeth and D. Cusack (2003) Design of a Team of Soccer Playing Robots, presented at Autonomous Minirobots in Research and Edutainment (AMiRE), Brisbane, Australia.
D. Ball and G. Wyeth (2004) UQ RoboRoos: Getting Smarter. RoboCup 2004: Robot Soccer World Cup VIII. Lecture Notes in Artificial Intelligence 3276, Springer Verlag, Lisbon, Portugal.
D. Ball, G. Wyeth, I. Linnett and L. Carr (2004) UQ RoboRoos 2003: The Complete Rewrite. RoboCup 2003: Robot Soccer World Cup VII, Lecture Notes in Artificial Intelligence 3020, Springer Verlag, Padua, Italy.
G. Wyeth, D. Ball, D. Cusack and A. Ratnapala (2002) UQ RoboRoos: Achieving Power and Agility in a Small Size Robot. RoboCup-2001: Robot Soccer World Cup V. Lecture Notes in Artificial Intelligence 2377, Springer Verlag, Fukuoka, Japan.