About
I’m a Technical Program Manager at Waymo, formerly the Google Self driving car project. As a TPM I align, communicate and execute Waymo’s roadmap.
I’m a technical program, engineering and research manager with seventeen years experience leading teams to develop robots for field and indoor applications. Breadth and depth expertise in designing real-world full-stack autonomous vehicle systems including multi-robot coordination, path planning, motion control, localisation and perception systems, coupled to sensor, hardware and compute. Demonstrated ability to conduct and lead research with 40+ conference and journal publications with 550+ citations.
Previously I was a Bai Rui Taekwon-Do instructor and coach. In 10+ years of instructing I helped 25 students reach Black Belt, coached successful teams to a national and international tournament, ran an elite fitness squad and was the tournament director for more than 20 national and international events.
My homeland is Australia. I currently live in Mountain View, USA with my partner Ruth Schulz and my daughters Sophie and Penny Ball.
Portfolio
Deepfield – Weeding Robotics
Agricultural Robotics
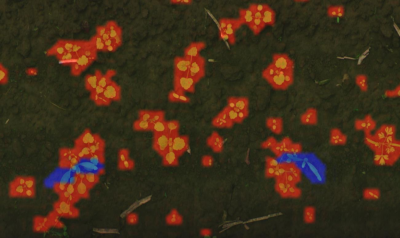
At Deepfield robotics we developed the technology for autonomous vehicles to improve conventional and organic weed management as part of our mission to sustainably increase agricultural production whilst minimizing environmental impact. Effective weed management is crucial to maximize crop yield. We developed small light weight robots, technology to distinguish crop [...]

Robotics for Zero-Tillage Agriculture (AgBot)
Agricultural Robotics
Farmers are under growing pressure to increase production to feed a growing population, while at the same time considering environmental impact and constraints on land, water and labour. The increasingly larger farm machines cause significant soil compaction damage and are a single point of failure. Hence, in this project we [...]

iRat – Intelligent Rat animat technology
iRat, Thinking Systems
The iRat (intelligent Rat animat Technology) is a rat animat robot designed for robotic and neuroscience teams as a tool for studies in navigation, embodied cognition, and neuroscience research. The rat animat has capabilities comparable to the (then) popular standard Pioneer DX robots, but is an order of magnitude smaller [...]
Online ROS
Web System
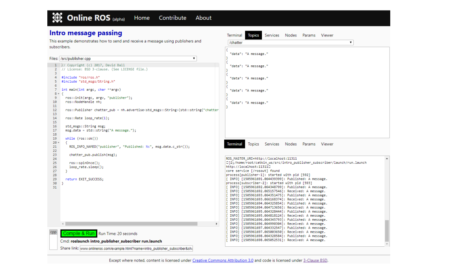
Online ROS allows people to view, edit, compile and execute ROS code in the browser. It is also supports shared collaborative coding. This could be used for online ROS based interviews, in teaching environments and to store complete working examples. It uses NodeJS for the server, Ace for the web based editor, docker for isolated execution, robot [...]

RoboRoos – Robot Soccer
Robot Soccer
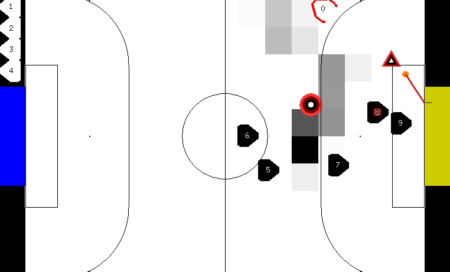
The RoboRoos Robot Soccer team competed in the Small Size League of the annual RoboCup competitions. The goal of the RoboCup federation is "By the year 2050, develop a team of fully autonomous humanoid robots that can win against the human world soccer champion team." The rules are similar to the [...]

Strategic Investment in Farm Robotics (SIFR)
Agricultural Robotics
This project is fast-tracking robotic technology for farms. Its purpose is to reinvigorate agriculture through increased production and reduced costs. Such technology can be used to conduct autonomous multi-vehicle operations in applications of weed management, fertilising, and seeding. The use of multiple, cost-effective field robots can enable alternative weed destruction [...]

Automated field testing
Agricultural Robotics
Seed breeding is a critical part of agriculture and ensures food security through the development of new crop varieties that are higher-yielding, disease and drought resistant and adapted for each region. Best practise is to have breeders measure and record traits across a large number of seed trials. However, it [...]

Martial Arts Tournament System (MATS)
Web System
The Martial Arts Tournament System (MATS) is a complete open-source system to manage the running of a tournament. MATS' features include: online registration for coaches, tools for divisioning, entering and printing various results. support for a broad range of division types including: sparring, patterns, round robin, special techniques, power breaking, and [...]
SAParm
Robot arm
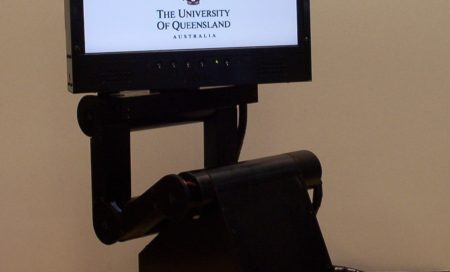
aka Robot Arm for Video Screen Manipulation The goal of the SAParm Project was to produce a proof-of-concept robotic video conferencing system to convey gestures of a remote conference participant. It could mimic human gestures such as nodding and shaking its head; show interest or strong feeling by moving forward; and [...]

Skippy the robot kangaroo
Mechanism Design
aka energy efficient legged locomotion The goal of this project was to create a new generation of legged robots that can traverse over rugged terrain in an energy-efficient manner. The team designed and tested a new energy efficient joint mechanism suitable for the robot’s knee. In particular, the joint’s stiffness [...]
Spherical Continuous Isotropic Omni Drive Robot
Mechanism Design
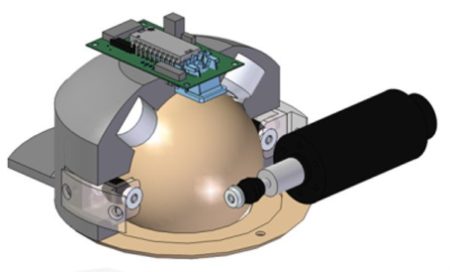
Robots comprised of an omni directional drive system have a distinct kinematic and mobility advantage over the standard differential drive and Ackermann (car-like) drive. In this project we designed an omni directional drive robot with very high mobility that can negotiate typical edge and gap traversal obstacles in an indoor environment. It is [...]

LingoDroids
iRat, Thinking Systems
Lingodroids are language learning robots that play games to construct shared lexicons. These fascinating mobile robots have learnt lexicons for places, distances, directions, and time. Our latest work demonstrates how to handle referential uncertainty, that is, how to resolve a word’s meaning between multiple candidates. Further, we have demonstrated language [...]

Insect environment replication
Thinking Systems
Scientists are trying to understand insect behaviour. To assist we developed a virtual world for Bees. This virtual world consisted of up to six monitors surrounding the Bee along with a controllable platform. We have a virtual display running across up to six monitors @ 1920 x 1200 @ 60 Hz. [...]
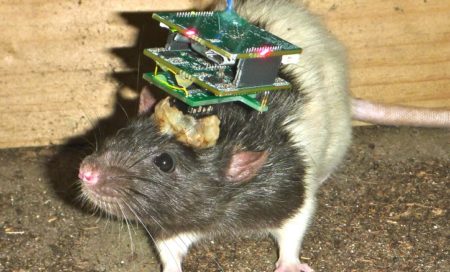
Rodent Scope – A wireless telemetry system for animals
Thinking Systems
Extracellular recordings in animals, made using wire implants within the brain, detect changes in the extracellular voltage when neurons discharge. Typically, electrophysiologists tether their rodent to their neural recording equipment which limits the range of possible experiments. In this project we designed a digital wireless neural telemetry system, Rodent Scope [...]
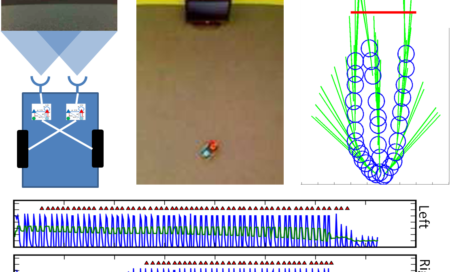
Spike Time Robotics
iRat, Thinking Systems
In this study a spiking network controls the iRat in real time. The study demonstrates how the neural controller directs the rat animat’s movement towards temporal stimuli of the appropriate frequency using an approach based on Braitenberg Vehicles. The circuit responds robustly after four cycles when first detecting a light [...]
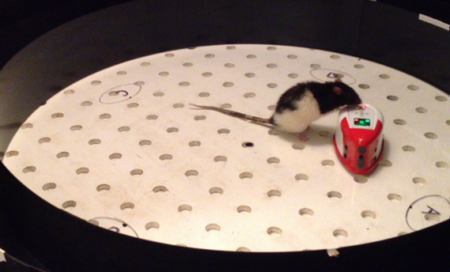
Rat meets iRat
iRat, Thinking Systems
Rats have long since been used in a wide range of behavioral studies. This project is ongoing work to use the iRat as modeling platform for neuroscience studies, for testing neural models of bio-inspired navigation algorithms and for behavioral studies showing rat-robot interactions. Many of the rats observed the iRat, peeping [...]
A Rat in the Browser
iRat, Thinking Systems
A telerobot, is a telepresence device that allows a user to interact with a robot over the internet. There are few active public telerobots on the internet. This work describes a new Internet telerobot framework suitable for autonomous mobile robots and designed for user edutainment. Users could give the robot navigation [...]
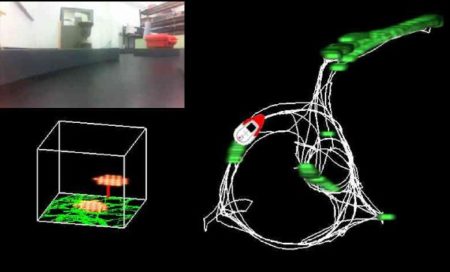
OpenRatSLAM
iRat, Thinking Systems
OpenRatSLAM, is an open-source C++ (ROS / OpenCV) and MATLAB version of RatSLAM. RatSLAM is a robot SLAM system based on the neural processes underlying navigation in the rodent brain, in particular the hippocampus.
Reading the Play – Adaptation by Prediction
Robot Soccer
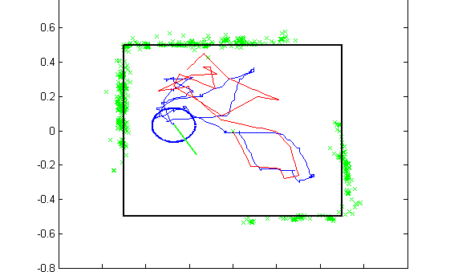
My PhD thesis project was “Reading the Play – Adaptation by Prediction”. The basis for the approach was akin to an elite sports player being able to "read the play", allowing for decisions to be made based on predictions of likely future outcomes. Using Markov chains we could model the [...]

RoIP Mission-Critical Communication
IP Communication
RoIP or Radio over IP is Zetron's next generation network for mission-critical communication gear. For reliability IP systems can be designed for multiple redundancies, especially by spoofing Ethernet switches with ARP packets. This can allow seamless failover of voice calls over IP devices. Zetron, a subsidiary of JVC Kenwood Corporation, designs mission-critical [...]
Blind Bayes
iRat, Thinking Systems
aka Maintaining a Cognitive Map in Darkness: The Need to Fuse Boundary Knowledge with Path Integration The iRat was used in one of Allen Cheung's studies to find out if animals need "cognitive maps". From the abstract: "Spatial navigation requires the processing of complex, disparate and often ambiguous sensory data. The [...]
CV
International robotics expert and leader with experience as the primary driver behind development of a diverse portfolio of real-time autonomous robotic and mechatronic systems for field and indoor applications. Expertise in designing real-world autonomous navigation systems including multi-robot coordination, global path planning, trajectory planning, and vehicle motion control coupled to localisation and obstacle detection systems. Significant experience with agricultural robotics as demonstrated by leading technology development across multiple projects. Author of 40+ conference and journal publications with 400+ citations.
Platforms – Linux, Embedded, Android, Windows, Docker, web
Middleware – Robot Operating System (ROS), Gazebo, Player-stage, GLUT, OpenCV
Languages – advanced C/C++, JavaScript, Python, MATLAB, PHP, Java
Sensors – Cameras, Lidar, GNSS/GPS, INS, encoders
Actuation – Linear and rotary actuators from a few to thousands of watts
Interfaces – Ethernet UDP/TCP, CAN, serial, data and memory buses, wireless
Tools – Git (GitHub), Altium/Protel, SolidEdge, Subversion
Techniques – Mobile robot and manipulator design, navigation systems, multi-robot coordination, global path planning, trajectory planning, vehicle motion control, localisation, simulation, computer vision, SLAM, trajectory control, electrical design, actuation, mechanisms, cognitive learning, docking, testing
Full CV and Bio available here.
Contact
david@davidmichaelball.com